

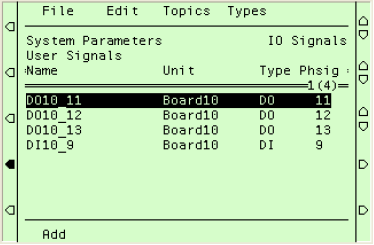
Which include input signals and output signals
University of South Australia
School of Engineering
Robotics and Automation
3. Each member has to submit a peer assessment sheet about the contribution of each member into the assignment. The assignment will not be marked if any member does not submit the peer assessment sheet on time and penalization will be applied to your assignment marks.
Due Date: 5pm/05th/September/2016
1. The Robot is required to write a word “ABB 2400” on the white board (150, 860 0). Instructions on writing of “ABB” and “2400” should be in separate sub-routines.
2. The Pen is being held by an Air Chuck on a Table (Ref. orientation position of pen (-613.59, -500, 290.89)).
7. A Proximity Switch is used to send the signal (DI10_9) to the Robot for starting the writing motions. You can manually to control the trigger of the sensor.
8. After finish writing, the Robot is required to put the pen back to the Air Chuck, and then return to its home position.
Figure 1 Station configuration of RobotStudio Assignment 2
Assessment:
• Structure the program to make it more logical and readable.
• Innovation and object creation including Pen, Workshop and table.
• Create a new IO unit named by Board10, which include 16 input signals and 16 output signals, the unit bus is located on the Base and the Address is set to be 10, Unit Type = d328.
4
as working tool in Robotic Studio. The key dimension can be found in Appendix A to save the measuring time.
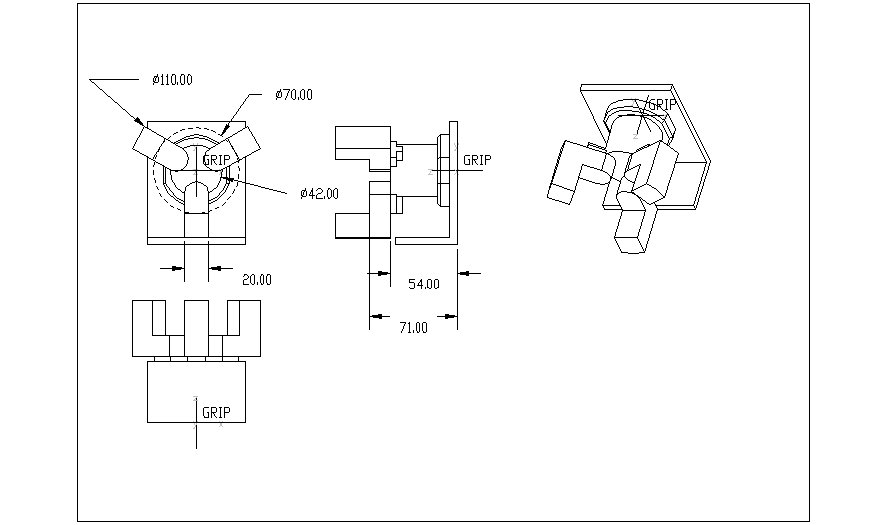
Figure 3 Gripper for assignment 2
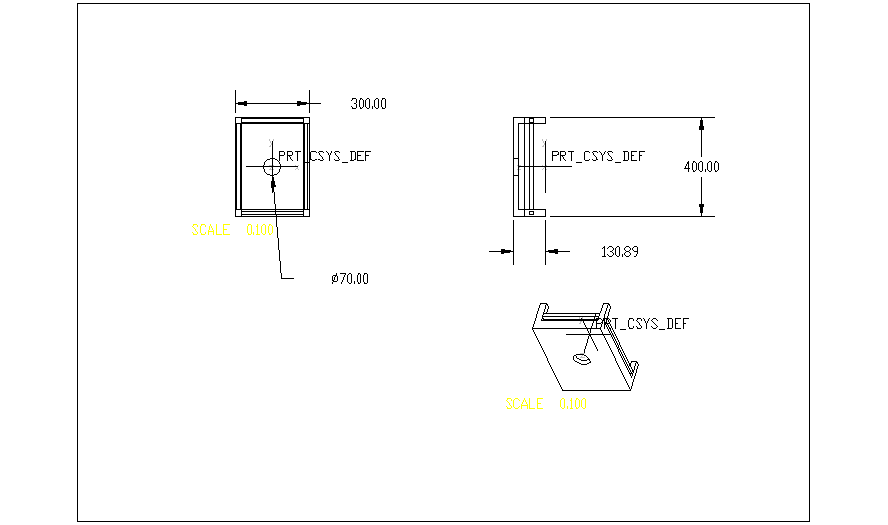
Figure 5 Table for assignment 2




