Please derive the transformation matrix between the end-effector and the base the robot coordinates systems dof planar robot with rotational joints
Suppose R is defined by the following sequence of basic rotations in the order specified:
A rotation of 35° about the current x-axis
Please use SolidWorks to draw the R according to the sequence.
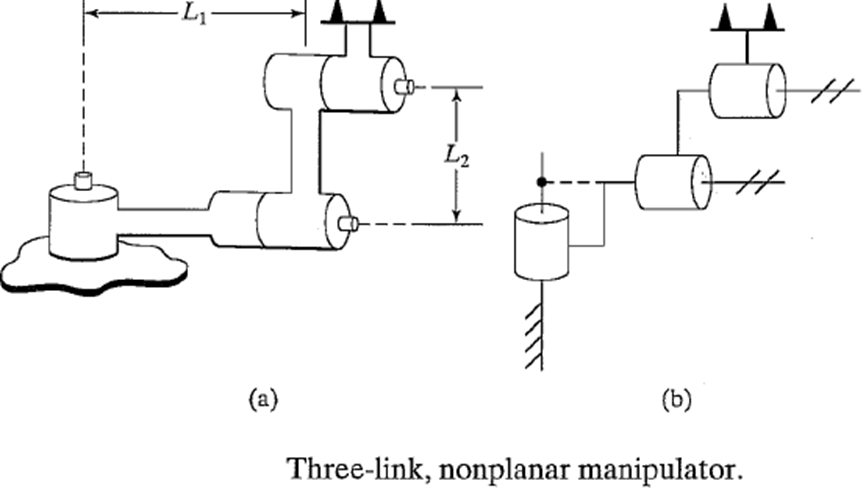
This is a 3 DOF planar robot with 3 rotational joints. Please derive the transformation matrix between the end-effector and the base of the robot coordinates systems.