

Note thatac the center oof the wheel moves circular path radius
Advanced
Dynamics
Donald T. Greenwood
http://www.cambridge.org
C⃝ Cambridge University Press 2003
| Typefaces Times 10.5/13 pt. and Helvetica |
|
|---|
A catalog record for this book is available from the British Library
ISBN 0-521 82612-8
1. Dynamics. I. Title.QA845.G826 2003
531′.11–dc21 2003046078
| page ix |
|---|
| 1 | Introduction to particle dynamics | ||
|---|---|---|---|
| 1.1 | 1 | ||
| 1.2 |
|
15 | |
| 1.3 |
|
34 | |
| 1.4 | 40 | ||
| 1.5 | 53 | ||
| 1.6 | 65 | ||
| 1.7 | 65 | ||
| 2 | Lagrange’s and Hamilton’s equations | ||
| 2.1 |
|
73 | |
| 2.2 |
|
84 | |
| 2.3 | 91 | ||
| 2.4 | 99 | ||
| 2.5 | 110 | ||
| 2.6 | 117 | ||
| 2.7 |
|
130 | |
| 2.8 |
|
130 | |
| 3 | Kinematics and dynamics of a rigid body | ||
| 3.1 | 140 | ||
| 3.2 | 159 | ||
| 3.3 |
|
162 | |
| 3.4 |
|
188 | |
| 3.5 | 205 | ||
| 3.6 | 206 | ||
| 4.1 |
|
217 | |
| 4.2 |
|
219 | |
| 4.3 | 226 | ||
| 4.4 | 234 | ||
| 4.5 | 246 | ||
| 4.6 | 254 | ||
| 4.7 |
|
261 | |
| 4.8 |
|
274 | |
| 4.9 | 278 | ||
| 4.10 | 279 | ||
| 5.1 |
|
289 | |
| 5.2 |
|
296 | |
| 5.3 | 304 | ||
| 5.4 | 307 | ||
| 5.5 | 315 | ||
| 5.6 | 322 | ||
| 5.7 |
|
323 | |
| 5.8 |
|
324 | |
| 6.1 | 329 | ||
| 6.2 | 335 | ||
| 6.3 |
|
349 | |
| 6.4 |
|
356 | |
| 6.5 | 364 | ||
| 6.6 | 383 | ||
| 6.7 |
|
396 | |
| 6.8 |
|
396 | |
| 1 | |||
| A.1 | 401 | ||
| 421 | |||
| 1 | Introduction to particle dynamics |
|---|
| 1.1 | Particle motion |
|---|
The laws of motion for a particle
Let us consider Newton’s three laws of motion which were published in 1687 in his Prin-cipia. They can be stated as follows:
F = ma (1.1)
Here F is the total force applied to the particle of mass m and it includes both direct contact forces and field forces such as gravity or electromagnetic forces. The acceleration a of the particle must be measured relative to an inertial or Newtonian frame of reference. An example of an inertial frame is an xyz set of axes which is not rotating relative to the “fixed”
are equal in magnitude, opposite in sense, and are directed along the straight line joining the particles.
Thecollinearityoftheinteractionforcesappliestoallmechanicalandgravitationalforces. It does not apply, however, to interactions between moving electrically charged particles for which the interaction forces are equal and opposite but not necessarily collinear. Systems of this sort will not be studied here.
and v is the particle velocity relative to an inertial frame.
Kinematics of particle motion
and its acceleration is
a = ˙v = ¨xi + ¨yj + ¨zk (1.6)
| 3 |
|---|
where (Fx, Fy, Fz) are the scalar components of F. In general, the force components can be functions of position, velocity, and time, but often they are much simpler.
If one writes Newton’s law of motion, (1.1), in terms of the Cartesian unit vectors, and then equates the scalar coefficients of each unit vector on the two sides of the equation, one obtains
where the unit vectors e1, e2, and e3 form a mutually orthogonal set such that e3 = e1 × e2. This unit vector triad changes its orientation with time. It rotates as a rigid body with an angular velocity ω, where the direction of ω is along the axis of rotation and the positive sense of ω is in accordance with the right-hand rule.
The first time derivative of A is
˙A = ( ˙A)r + ω × A (1.12)
Here˙A is the time rate of change of A, as measured in a nonrotating frame that is usually considered to also be inertial. (˙A)r is the derivative of A, as measured in a rotating frame in
|
(1.13) | |
|
||
| (1.14) | ||
Suppose that the position of a particle P is specified by the values of its cylindrical coordi-nates (r, φ, z). We see from Fig. 1.1 that the position vector r is
r = rer + zez (1.15)
| r | P |
|
|---|---|---|
|
| O | y |
|---|
Figure 1.1.
| 5 |
|---|
v = ˙r = ˙rer + r˙φeφ + ˙zez (1.18)
Similarly, noting that
velocity and acceleration equations for plane motion using polar coordinates.
Spherical coordinates
(1.21) (1.22) |
|---|
| r | P | eq |
|---|
| O | y |
|---|
x
Figure 1.2.
|
(1.23) |
|---|
Then, upon differentiation of (1.21), we obtain the velocity
| (1.25) |
|---|
Suppose a particle P moves along a given path in three-dimensional space. The position of the particle is specified by the single coordinate s, measured from some reference point along the path, as shown in Fig. 1.3. It is convenient to use the three unit vectors (et, en, eb) where et is tangent to the path at P, en is normal to the path and points in the direction of the center of curvature C, and the binormal unit vector is
|
z | C | ρ | et | (1.26) | |
|---|---|---|---|---|---|---|
| en | P |
| O | y |
|---|
Figure 1.3.
| 7 |
|
|---|
| (1.27) | |
|---|---|
| (1.28) | |
Thus, we find that the acceleration of the particle is
a = ˙v = ¨set + ˙s˙et = ¨set +˙s2 ρen (1.29)
Note that ωn = 0 and also that deb/ds represents the torsion of the curve. |
(1.30) |
|---|---|
| (1.31) |
Relative motion and rotating frames
where we note again that the frame A is moving in pure translation.
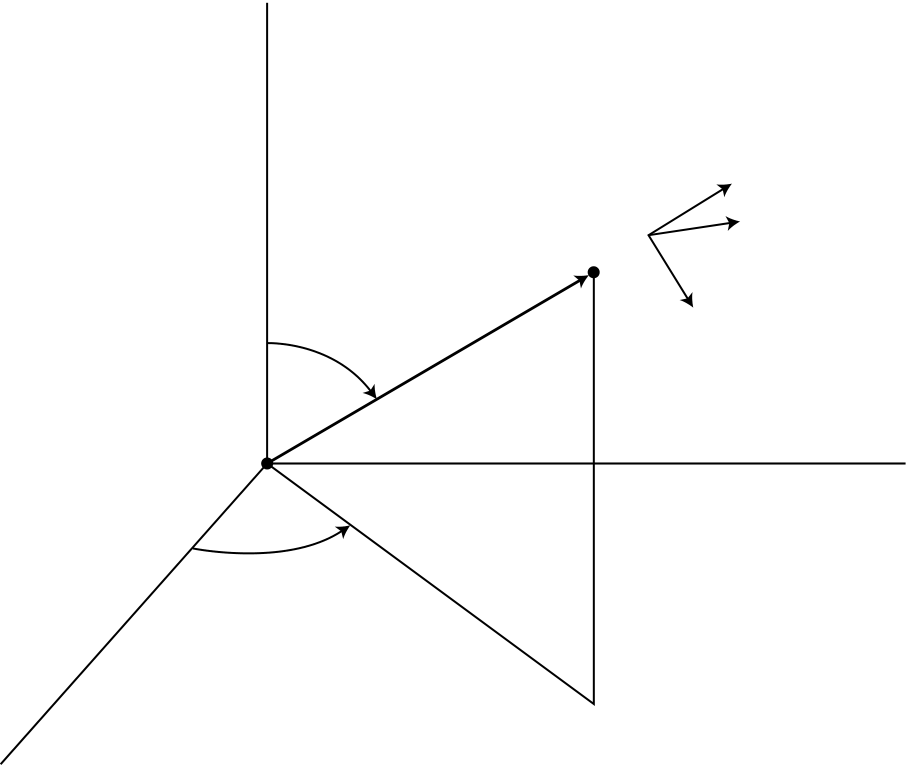
Now consider the general case in which the moving xyz frame (Fig. 1.4) is translating and rotating arbitrarily. We wish to find the velocity and acceleration of a particle P relative
| z |
|---|
Z
r yr
w
| O | R | x |
|---|
| 9 |
|
|---|
Thus, we obtain the important result:
a = ˙v =¨R + ˙ω × ρ + ω × (ω × ρ) + ( ¨ρ)r + 2ω × ( ˙ρ)r (1.42)
| vB | B |
|---|
P
| rB | r | vA |
|
|---|---|---|---|
| C | rA |
|
|---|
extension thereof, at which the velocity is momentarily zero. This is the instantaneous center of rotation.
Example 1.1 A wheel of radius r rolls in planar motion without slipping on a fixed convex surface of radius R (Fig. 1.6a). We wish to solve for the acceleration of the contact point on the wheel. The contact point C is the instantaneous center, and therefore, the velocity of the wheel’s center O′is
v = rωeφ (1.44)
| O′ | O |
|---|
f.
| C |
|
ω | O′ | R | |
|---|---|---|---|---|---|
| O | C | ||||
|
er |
|||||
| (a) | (b) |
| 11 |
|---|
| (1.45) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
|
|||||||||
|
(1.46) | ||||||||
|
|||||||||
| (1.49) | |||||||||
|
(1.50) | ||||||||
|
|||||||||
| (1.51) | |||||||||
| (1.52) | |||||||||
| (1.53) | |||||||||
|
|||||||||
| a | r | r2 | � | � | Rr | � | (1.56) | ||
| C = − | � + | R − r | � | r = − | � | R − r | � | ||
|
|
|---|
| O′ | f | r |
|---|
k
C eq
er
|
|||
| (1.57) | |||
| ω =r R | (1.58) | ||
|
(1.61) (1.62) |
|
|---|---|---|
| ˙ω =r R | ||
| 13 |
|---|
|
|
|
|---|---|---|
and
|
(1.66) |
|---|
− (r¨φ sin φ + r˙φ2cos φ)k |
er + | �r¨φ(1 + cos φ) − r˙φ2 | �1 +r2 R2 | � | ||
|---|---|---|---|---|---|---|
| (1.69) | ||||||
|
||||||
where k is a constant (Fig. 1.8). Let us find an expression for its acceleration. Also solve for the radius of curvature of the spiral at a point specified by the angle θ.
| et | er | en | r | y | |||
|---|---|---|---|---|---|---|---|
| eq | α | ||||||
|
|
|---|
(1.71) (1.72) |
|---|
| (1.73) | ||
|---|---|---|
| (1.74) | ||
|
||
| tan α =vr vθ |
|
(1.75) |
|
(1.76) | |
|---|---|---|
(1.77) |
||
| an = | ||
| 15 |
|
||
|---|---|---|---|
|
|||
| (1.80) | |||
ρ =k(1 + θ2)3/2 2 + θ2 Notice that ρ varies from1 2k at θ = 0 to r for very large r and θ. |
(1.81) | |
|---|---|---|
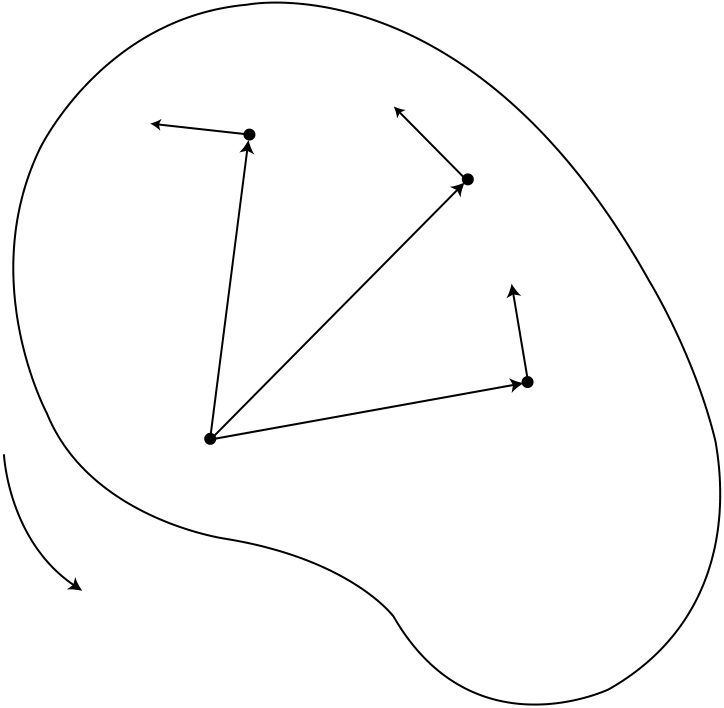
| 1.2 | Systems of particles |
| Fi |
|
|---|
fij
| O | ri | rc | rj | fji | mj | ||
|---|---|---|---|---|---|---|---|
Figure 1.9.




