

Vol 54 No 2, June 2020
|
–5 |
λ
0.5 |
|
squint. Grating lobes can be hard to visualize, so we’ll draw on
their similarity
|
|
|
|
–30 |
| –35 |
An Introduction to Grating Lobes
|
–40 |
Analogy to Sampled Systems
An analogy to visualize grating lobes is to think of aliasing in a
sampled system. In an analog-to-digital converter (ADC), undersampling
is often used when frequency planning a receiver architecture.
Undersampling involves purposefully reducing the sample rate (fS) such
that the sampling process translates frequencies above fS/2 (the higher
Nyquist zones) to appear as aliases in the first Nyquist zone. This
causes those higher frequencies to appear as if they were at a lower
frequency at the output of the ADC.
| θ = arcsin |
|
m× |
|
|
(5) |
|
∆Φ |
× λ d
|
(2)
|
|
| 2� |
|
|
|
exist. For example, if λ/d = 0.66 (that is, d = 1.5λ), then real
arcsin solutions
|
would exist for m = 0 and for m = ±1. That m = ±1 is the second
solution, which is
|
|
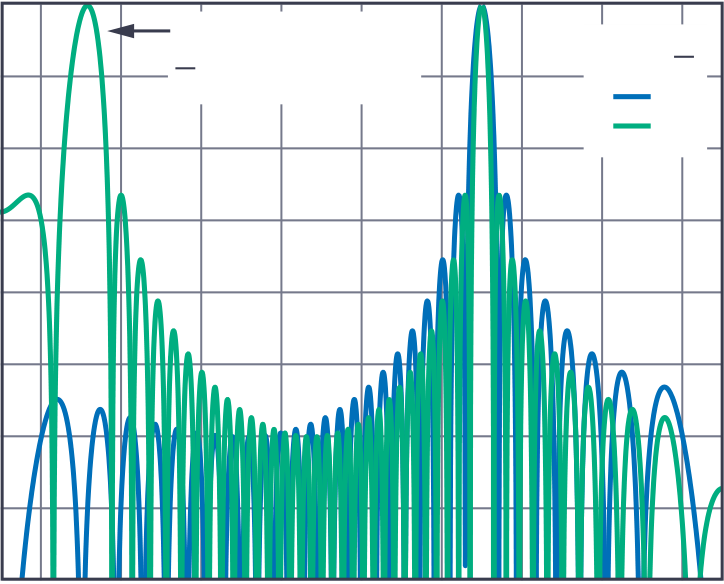
If we do so, then all the spatial images (that is, m = ±1, ±2, etc.)
will produce non-real arcsin results, and we can ignore them. But if we
can’t do this, and therefore some values of m > 0 produce real arcsin
results, then we end up with multiple solutions: grating lobes.
| –5 |
| –15 |
| –25 |
| –35 |
| –80 |
–60 |
–40 |
–20 |
0 |
20 |
40 |
60 |
80
|
Angle (°)
θ = arcsin m , for ∆Ф = 0 λ
d
So for Example: λ/d = 0.66
0 = Actual Lobe
X = Grating Lobes
| We saw ∆Φ range from 0 to ±π as the main
lobe deviated from mechanical |
| boresight. Therefore, |
10 |
| 5 |
| will range |
| –10 |
|
(8) |
–20 |
| argument > 1 for all |m| ≥ 1. Consider two
cases: |
It is an interesting trade-off that will be explored in the next
section.
Element Spacing Considerations
This dmax is the condition for no grating lobes in the reduced scan
angle (θmax), where θmax is less than π/2 (90°). For example, if the
signal frequency is 10 GHz and we need to steer ±50° without grating
lobes, then the maximum element spacing is:
There are also antenna architectures worth noting that attempt to
overcome the grating lobe problem by producing a nonuniform element
spacing. These are categorized as aperiodic arrays, with spiral arrays
as an example. For mechanical antenna construction reasons, it may be
desirable to have a com-mon building block that can be scaled to a
larger array, but this would produce a uniform array that is subject to
the grating lobe conditions described.
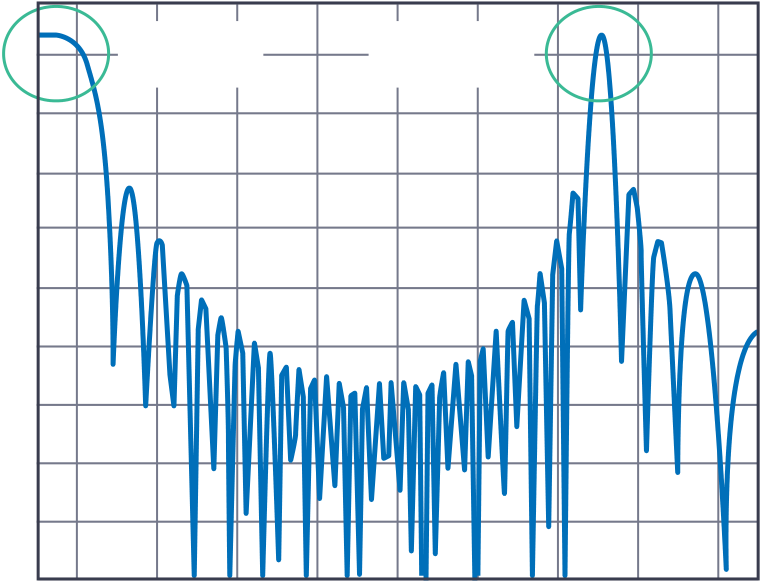
Beam Squint
| –5 |
–5 |
| 11 GHz |
11 GHz |
| –15 |
–15 |
|
|
|
|
| 0 |
0 |
| (a) θ = 20 |
(b) θ = 40
|
0
–30
–35
and therefore no means to produce any beam squint. Therefore, the
amount of
|
15 |
beam squint must be a function of angle, θ, as well as the frequency
variation.
|
f0 |
1.1 |
|
10 |
|
|
beam direction deviation, beam squint, can be calculated as
|
| –10 |
| –15 |
|
|
Figure 6. Beam squint vs. beam angle for several frequency
deviations.
Beam Squint Considerations
The beam squint, deviation in steering angle vs. frequency, is caused
by approxi-mating a time delay with a phase shift. Implementing beam
steering with true time delay units does not have this problem.
shifter over a time delay unit? Typically, this comes down to design
simplicity and IC availability of phase shifters vs. time delays. Time
delays are implemented in some form of transmission line and the total
delay needed is a function of the aperture size. To date, most available
analog beamforming ICs are phase shift based, but there are families of
true time delay ICs emerging and these may become much more common for
phased array implementations.
digital beamforming algorithms. Therefore, a phased array
architecture where Artech House, 2005.
every element is digitized would lend itself naturally to overcome
the beam squint problem, while also providing the most programmable
flexibility. However, the power, size, and cost of such a solution can
be problematic.
|
 |
|
|
|
|
|
|
 |
For regional headquarters, sales, and distributors or |
|
|
|
|
|
|







