

Designing and tuning robust feedforward controllers
Take-Home Exam 1: Feedforward for a car cruise
control system under the presence of slope
|
|---|
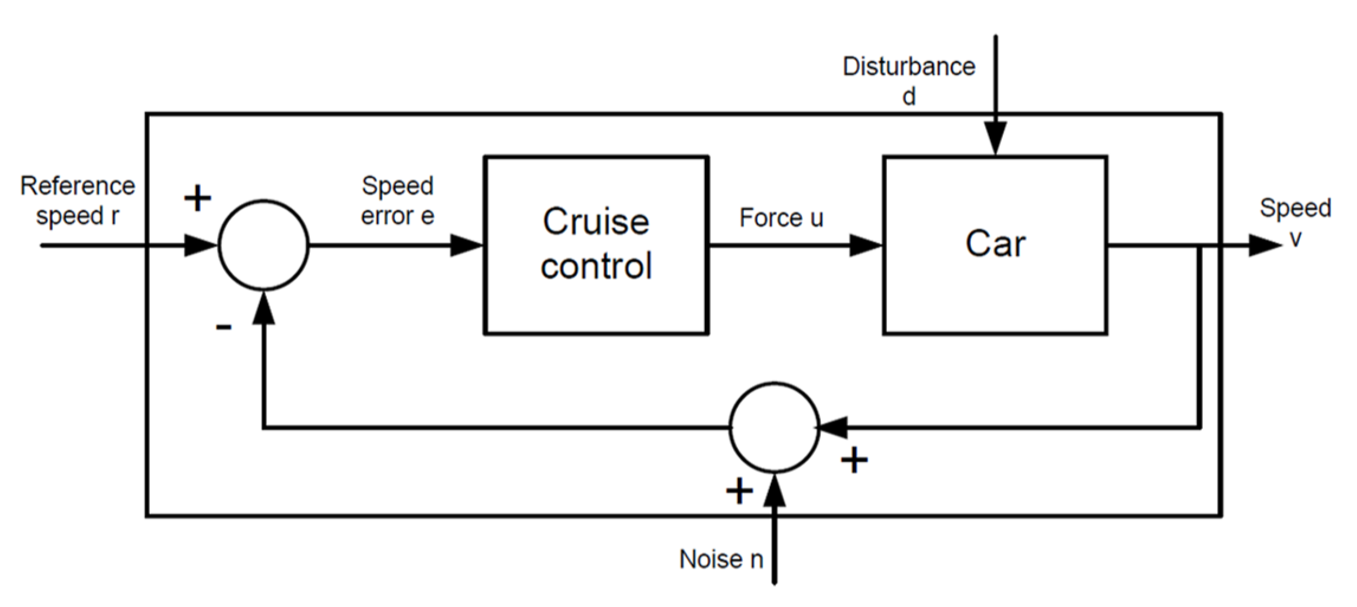
Figure 1: Block diagram for the car cruise control.
However, this car model does not include the presence of disturbances yet. When disturbance is present, it affects the closed-loop dynamics in a way that we do not desire. In this assignment, we will consider a situation where the car model is operating under the influence of slope disturbance.
3 Slope disturbance
|
|---|
If we give our cruise control with a certain reference speed, it should maintain such a speed despite the slope disturbances. One way to accomplish this is by utilizing an appropriate disturbance cancellation feedforward controller, under the assumption that the car model Gp(d) is accurate and the slope angle α(t) is measurable.
3
feedforward controller Cf(s) as:
|
|---|
– Implement the car model Gp(d) (from Section 2) into the dashed box.
– Run the m-file (‘Closed loop car m.m’), two plots like the ones shown in Figure 5 should appear.
| r()= | 10 | 2 |
|---|---|---|
| r()= | 1 + e−3(0.5t−4) | 2 |
|
|
(3) |
|---|
| α(t) = 30 + 10 sin(t) | (5) |
|---|
This results in the response shown in Figure 6.
6
[1] Eduardo Jose Adam and Jacinto L Marchetti. Designing and tuning robust feedforward controllers. Computers & Chemical Engineering, 28(9):1899–1911, 2004.
8




